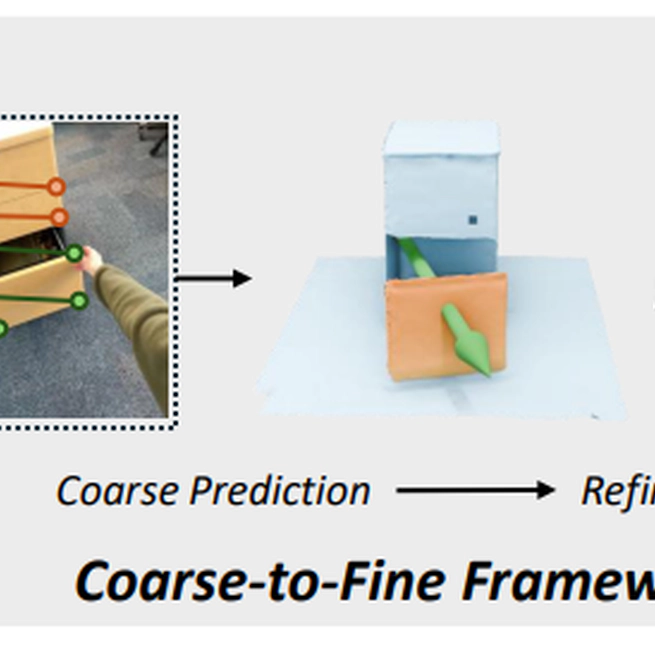
iTACO: Interactable Digital Twins of Articulated Objects from Casually Captured RGBD Videos
We develop a method that can reconstruct articulated objects from casually captured RGBD videos.
Jun 10, 2025

TieBot: Learning to Knot a Tie from Visual Demonstration through a Real-to-Sim-to-Real Approach
We develop a Real-to-Sim-to-Real approach that enables learning tie-knotting skills for robots.
Nov 6, 2024

ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots
We develop a foundation model on robotic manipulation via modeling contact points on the object.
Oct 14, 2024
ELIC: Efficient Learned Image Compression with Unevenly Grouped Space-Channel Contextual Adaptive Coding
We develop a deep image compression model that leverages the uneven information distribution within the latent variables for efficient image compression.
Jun 19, 2022