Weikun Peng
Open Menu
Close Menu
Home
Publications
Experience
Projects
Post
Article
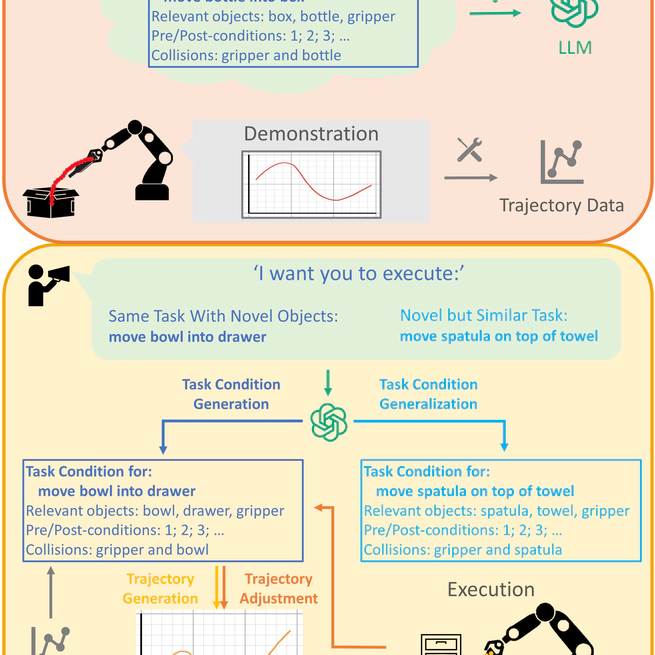
Generalizable Long-Horizon Manipulations with Large Language Models
We develop a system to solve long-horizon manipulation task with LLM.
Oct 3, 2023
Cite
×